RangeNet
Ranging Software
1D/2D/3D Ranging Software
RangeNet is TDSR’s localization software suite. Incorporating more than a decade of experience in building and deploying ultra wideband (UWB) localization products and solutions, RangeNet offers everything you need to move quickly from evaluation to prototype to deployment.
RangeNet Overview
RangeNet supports two-way ranging and communications, as well as operation as a complete ranging network (with ALOHA and TDMA scheduling) with a location engine to support navigation and tracking applications. Network coordination happens on the UWB module without host involvement. The software reports/logs waveform scan data and provides bias adjustment and a patented range quality metric which informs the user of blocked or compromised measurements. We provide a feature-rich API with sample C and MATLAB code for programmers.
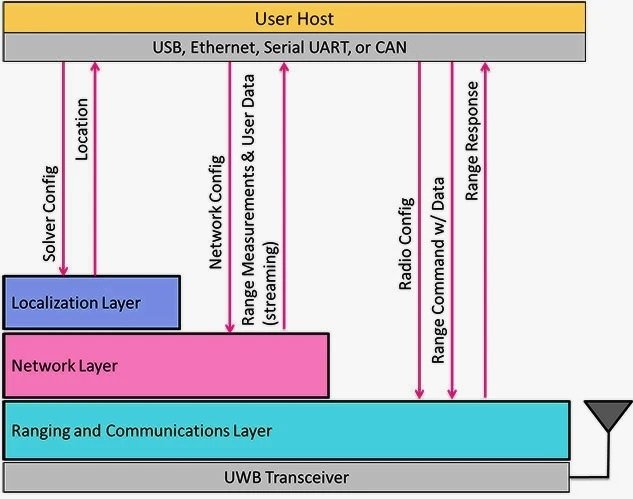
RangeNet works on any of TDSR’s UWB transceiver modules. The following graphic shows the different embedded software layers supported by RangeNet. Users can choose to interact at any level as the layers build upon each other.
Ranging
Using a unique UWB pulsed-RF signaling strategy ideal for two-way time-of-flight (TW-TOF) ranging and communications, our P452 OEM ranging radio modules provide peer-to-peer wireless distance measurements with exceptional accuracy in high multipath, highly reflective environments. We excel in places where GPS and other ranging / tracking systems struggle.
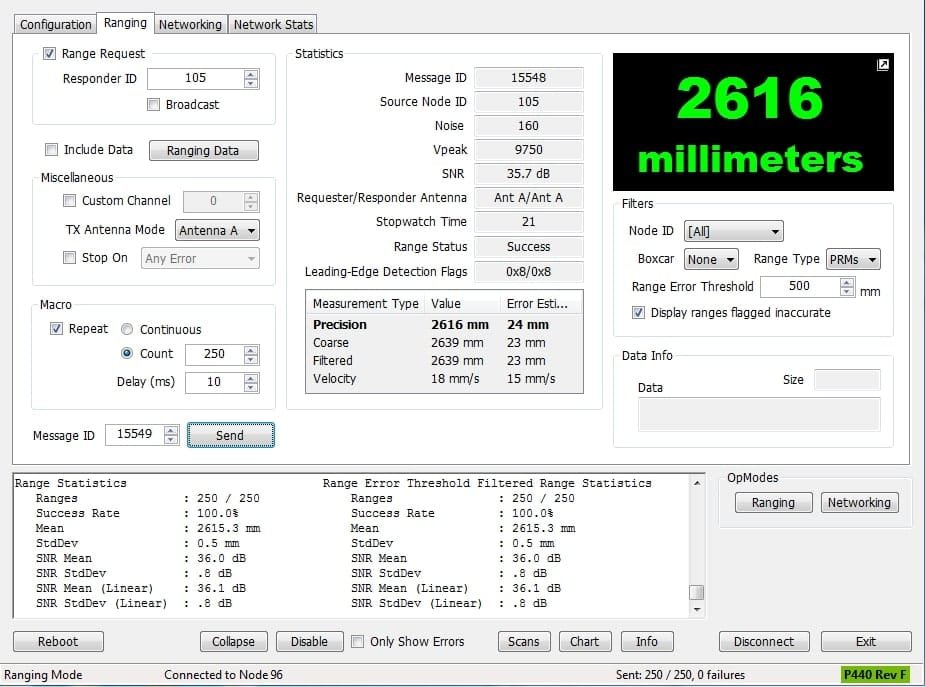
This fundamental Ranging and Communications capability forms the basis of RangeNet. In this mode a connected Host directs a UWB ranging radio to send a range request to another ranging radio, which will automatically respond. The time it takes to complete this ranging conversation is calculated and used to derive a precision distance measurement in millimeters, which is reported to the Host.
The software manages the two-way ranging conversations with optional data communications, and is used to reconfigure primary radio parameters such as pulse integration, code channel, and transmit gain through this layer. The user can also observe waveform scans in real-time and log them to disk for post-processing, which is extremely useful for characterizing performance in different environments.
A proprietary range quality metric, based on the direct-sampled signal signature, allows the user to easily detect blocked or compromised measurements. An estimate of the standard deviation of each range measurement is provided with each reading. This is ideal for supporting Kalman Filter-based localizers.
Networking
The second layer in the RangeNet software stack is the Networking layer. This layer coordinates airtime access among multiple UWB ranging radio modules and automates the ranging process and makes it simple to create a localization network. When using the Networking layer, the Host will receive streamed range measurements rather than having to initiate each individual ranging conversation.

RangeNet will support two scheduler options: ALOHA and TDMA. The Host will be able to dynamically switch between these two media access control (MAC) options.
ALOHA (random scheduling) mode is ideal for mobile ad hoc operations. Nodes are automatically targeted as they enter the area and dropped from targeting as they depart. No network coordination is needed.
TDMA (Time Division Multiple Access) mode allows the user to dynamically configure a detailed schedule in each node stipulating the range initiator, range target, code channel, and pulse integration in each time slot. The nodes are automatically synchronized for fast, focused and efficient use of airtime. Slots can even be configured as sleep slots allowing duty cycling and power savings for battery operations!
RangeNet is the easiest way to implement a network with our radios — offering you significant savings in time and money.
Localization
The third and final piece of our RangeNet software is the Location layer, which enables a UWB ranging radio module to iteratively solve for its own mobile location relative to a map of other ranging radios configured as static “anchor” nodes. Such a system can be quickly deployed and dynamically reconfigured using RangeNet’s basic “Auto-Survey” capability.
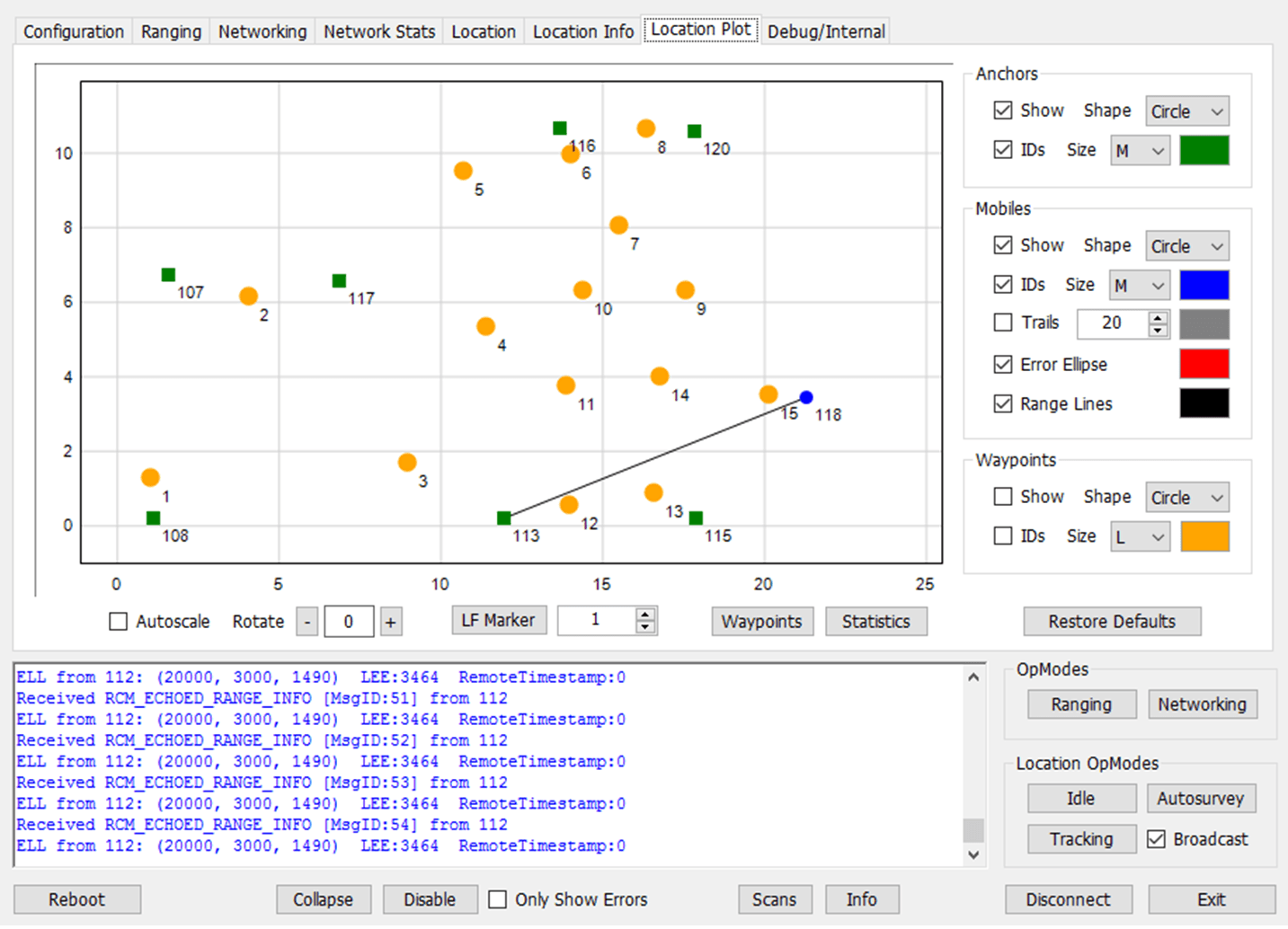
During the Auto-Survey process, anchor nodes are deployed around the localization area. These anchor nodes automatically range to each other (using the Networking features described on the prior tab) and broadcast the range measurements to a Host connected to any anchor node or mobile node in the system. The Auto-Survey process relies on a Weighted Nonlinear Least Squares (WNLS) algorithm to form an optimal polygon and maps this polygon to a coordinate grid.
Once the user is satisfied with the coverage and accuracy of the Auto-Survey process (the user can survey anchor node positions manually if desired), the anchors transition to “beacon” mode and one or more mobile nodes are activated. The mobile nodes are identical to the anchor nodes but use their Extended Kalman Filter (EKF) location capabilities. Mobile nodes maintain a local neighbor list formed through anchor beaconing, and optimally choose ranging targets based upon minimization of localization covariance.
Mobile Nodes iteratively broadcast their latest location and location error estimates. Systems based on RangeNet are quick to deploy, scalable, and completely wireless except for connections to a Host. They are exceptionally accurate indoors due their pulsed UWB RF signaling strategy.
Now multiple vehicles or personnel tags can range to each other and to static references to enable a navigation system. Multiple mobile devices will dynamically target each other, making collision warning applications easy. RangeNet is ideal for robotic swarms, leader-follower applications, precision tracking, and much more.
Ranging
Using a unique UWB pulsed-RF signaling strategy ideal for two-way time-of-flight (TW-TOF) ranging and communications, our P452 OEM ranging radio modules provide peer-to-peer wireless distance measurements with exceptional accuracy in high multipath, highly reflective environments. We excel in places where GPS and other ranging / tracking systems struggle.
This fundamental Ranging and Communications capability forms the basis of RangeNet. In this mode a connected Host directs a UWB ranging radio to send a range request to another ranging radio, which will automatically respond. The time it takes to complete this ranging conversation is calculated and used to derive a precision distance measurement in millimeters, which is reported to the Host.
The software manages the two-way ranging conversations with optional data communications, and is used to reconfigure primary radio parameters such as pulse integration, code channel, and transmit gain through this layer. The user can also observe waveform scans in real-time and log them to disk for post-processing, which is extremely useful for characterizing performance in different environments.
A proprietary range quality metric, based on the direct-sampled signal signature, allows the user to easily detect blocked or compromised measurements. An estimate of the standard deviation of each range measurement is provided with each reading. This is ideal for supporting Kalman Filter-based localizers.
Networking
The second layer in the RangeNet software stack is the Networking layer. This layer coordinates airtime access among multiple UWB ranging radio modules and automates the ranging process and makes it simple to create a localization network. When using the Networking layer, the Host will receive streamed range measurements rather than having to initiate each individual ranging conversation.
RangeNet will support two scheduler options: ALOHA and TDMA. The Host will be able to dynamically switch between these two media access control (MAC) options.
ALOHA (random scheduling) mode is ideal for mobile ad hoc operations. Nodes are automatically targeted as they enter the area and dropped from targeting as they depart. No network coordination is needed.
TDMA (Time Division Multiple Access) mode allows the user to dynamically configure a detailed schedule in each node stipulating the range initiator, range target, code channel, and pulse integration in each time slot. The nodes are automatically synchronized for fast, focused and efficient use of airtime. Slots can even be configured as sleep slots allowing duty cycling and power savings for battery operations!
RangeNet is the easiest way to implement a network with our radios — offering you significant savings in time and money.
Localization
The third and final piece of our RangeNet software is the Location layer, which enables a UWB ranging radio module to iteratively solve for its own mobile location relative to a map of other ranging radios configured as static “anchor” nodes. Such a system can be quickly deployed and dynamically reconfigured using RangeNet’s basic “Auto-Survey” capability.
During the Auto-Survey process, anchor nodes are deployed around the localization area. These anchor nodes automatically range to each other (using the Networking features described on the prior tab) and broadcast the range measurements to a Host connected to any anchor node or mobile node in the system. The Auto-Survey process relies on a Weighted Nonlinear Least Squares (WNLS) algorithm to form an optimal polygon and maps this polygon to a coordinate grid.
Once the user is satisfied with the coverage and accuracy of the Auto-Survey process (the user can survey anchor node positions manually if desired), the anchors transition to “beacon” mode and one or more mobile nodes are activated. The mobile nodes are identical to the anchor nodes but use their Extended Kalman Filter (EKF) location capabilities. Mobile nodes maintain a local neighbor list formed through anchor beaconing, and optimally choose ranging targets based upon minimization of localization covariance.
Mobile Nodes iteratively broadcast their latest location and location error estimates. Systems based on RangeNet are quick to deploy, scalable, and completely wireless except for connections to a Host. They are exceptionally accurate indoors due their pulsed UWB RF signaling strategy.
Now multiple vehicles or personnel tags can range to each other and to static references to enable a navigation system. Multiple mobile devices will dynamically target each other, making collision warning applications easy. RangeNet is ideal for robotic swarms, leader-follower applications, precision tracking, and much more.
Contact us today to put PulsON precision to work for you!
PulsON Product Portfolio
Be sure to explore our related products, including the P452 radio module designed for ranging/localization, our discounted ranging hardware/software/support bundle for integrators, and the special P452 version configured for radar sensing and channel analysis.
P452 Ranging
Radio
Ranging / localization kit

SENSOR